Una planta que se riega sola: autorriego con Arduino
En el Sustainability Lab de Agüita House construimos un sistema de autorriego con Arduino que mide la humedad de la tierra y acciona una bomba solo cuando hace falta. Del kit que funciona hasta una planta conectada a internet.

¿Y si una planta se regara sola, usando solo el agua que necesita y ni una gota más? Esa fue la pregunta con la que arrancamos uno de los talleres del Sustainability Lab de Agüita House, en Las Palmas de Gran Canaria. La respuesta fue un pequeño sistema de autorriego construido con Arduino que mide la humedad de la tierra y enciende una bomba solo cuando la planta tiene sed. Aquí contamos cómo funciona y qué aprendimos por el camino.
La idea: aprender de arriba abajo
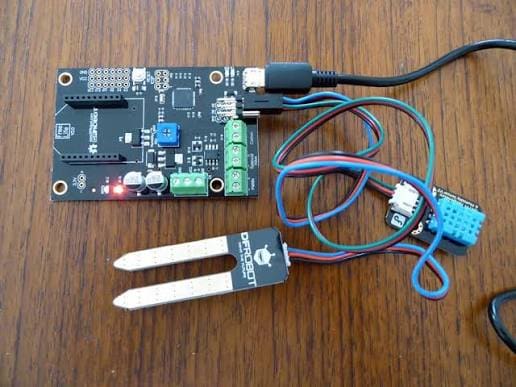
En lugar de empezar por la teoría, empezamos por el final: con un sistema completo y funcionando. Partimos del kit DFRobot EcoDuino y lo estudiamos de arriba abajo —primero el conjunto, después las piezas—. La primera tarea fue identificar cada componente y clasificarlo en dos familias:
- Entradas (sensores): miden el mundo. La sonda de humedad de la tierra y el sensor de temperatura y humedad ambiental DHT11.
- Salidas (actuadores): actúan sobre el mundo. La bomba de agua que riega la planta.
Con eso en la mano, dibujamos el bucle que está detrás de casi cualquier dispositivo inteligente: percibir → decidir → actuar (sense → decide → act). El sistema lee los sensores, decide si la tierra está demasiado seca y, si es así, activa la bomba.
El programa completo, desde el primer minuto
En vez de escribir el código línea a línea, subimos a la placa el programa
completo (SelfWateringPlant.ino) una sola vez y aprendimos a manejarlo
desde el Monitor Serie. Con unos pocos comandos por consola decidíamos qué
parte del programa se ejecutaba:
test sensors— probar los sensorestest actuators— probar los actuadoresnormal run— funcionamiento normal
Esta forma de trabajar nos dejó tocar y entender cada parte sin miedo a romper nada, antes de mirar el código por dentro.
La anatomía de un sketch de Arduino
Una vez en confianza, abrimos el capó. Todo programa de Arduino comparte la misma estructura de tres partes, y reconocerla es la mitad del trabajo:
- Preámbulo — qué necesitamos y cómo se llaman las cosas (librerías, pines, variables).
setup()— se ejecuta una vez al arrancar: prepara los pines y el sistema.loop()— se repite para siempre: aquí vive el bucle percibir → decidir → actuar.
Probar las piezas
Los sensores: medir y calibrar
Con el modo test sensors, la bomba se bloquea por seguridad y el programa
imprime tres lecturas: humedad de la tierra, temperatura y humedad ambiental.
Aquí apareció un concepto clave: la calibración. Una sonda de humedad no da
"porcentajes" mágicos; da un número crudo (analog read) que hay que traducir.
Para eso anotamos dos puntos de referencia:
- el valor con la sonda en seco,
- y el valor con la sonda en tierra húmeda.
Entre esos dos extremos, el sistema sabe interpretar cuándo la planta tiene sed.
Los actuadores: por qué un motor nunca va directo a un pin
Con test actuators, los sensores se ignoran y la bomba pulsa de forma
controlada. Aprendimos una regla de oro de la electrónica: un motor nunca se
conecta directamente a un pin del microcontrolador. Consume demasiada corriente
y puede dañar la placa. Por eso la bomba pasa por un driver de motor y por
componentes de protección que hacen de intermediarios seguros.
Funcionamiento normal: la lógica del riego
Con normal run, todo está vivo. Aquí está el corazón del proyecto: la regla
de riego, que no es un simple "si está seco, riega". Usa tres ideas para regar
bien y no encharcar:
- Umbral (threshold): el nivel de humedad por debajo del cual hace falta regar.
- Histéresis (hysteresis): un margen para que la bomba no se encienda y apague sin parar cada vez que la lectura tiembla alrededor del umbral.
- Riego por tandas y reposo (burst-and-soak): un límite de seguridad que riega un poco, deja que el agua se reparta por la tierra y vuelve a medir, en lugar de soltar todo de golpe.
El resultado es una planta regada, no inundada —y un uso del agua mucho más eficiente que el riego manual a ojo.
El siguiente paso: de la maceta a internet
El taller terminó mirando hacia dónde puede crecer este proyecto, conectándolo con el resto del laboratorio:
- WiFi con un ESP32: cambiamos el "cerebro" por uno que habla con internet. La misma lógica, pero ahora la planta puede reportar sus datos en línea y ser alcanzable desde cualquier sitio (por ejemplo, vía MQTT).
- Inteligencia en el bucle: ¿puede un modelo de lenguaje ayudar a decidir cuándo regar? Enviamos a una API los datos del sensor como contexto y dejamos que razone con nosotros una recomendación de riego.
- Mando a distancia y redes de plantas: activar la bomba desde el móvil y, de ahí, imaginar muchas plantas reportando a un mismo panel. El jardín se convierte en una red de nodos interconectados.
Lo que nos llevamos
Lo bonito de este proyecto no es solo la planta: es comprobar que cualquiera, sin experiencia previa, puede entender cómo una pequeña automatización hace las cosas cotidianas más eficientes y sostenibles. De un kit que ya funciona, pasamos a entender los sensores, los actuadores y la lógica que los une —y a vislumbrar un futuro donde el riego es inteligente, conectado y mide para gastar menos.
Este taller forma parte del Sustainability Lab de Agüita House, donde aprendemos haciendo, en comunidad y frente al océano. ¿Quieres construir el tuyo? Escríbenos.